官方微信:日成最新資訊
官方微信:日成最新資訊 移動(dòng)官網(wǎng)
移動(dòng)官網(wǎng) 官方商城
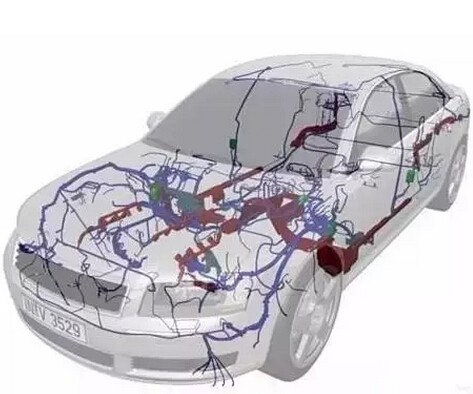
官方商城汽車網(wǎng)絡(luò)和控制器是汽車的兩個(gè)重要組成部分。控制器相當(dāng)于汽車的大腦,是控制各個(gè)部分運(yùn)行,發(fā)送受數(shù)據(jù)的控制部件;而網(wǎng)絡(luò)則相當(dāng)于汽車的神經(jīng),是這些模塊問(wèn)的接線。它們需要通過(guò)頻繁的接收和發(fā)送數(shù)據(jù),對(duì)汽車進(jìn)行時(shí)時(shí)檢測(cè)和控制。隨著電子工業(yè)和汽車線束工業(yè)的發(fā)展,這種模塊間的通信會(huì)越來(lái)越頻繁,如果還是像以前那樣使用CAN汽車總線,節(jié)點(diǎn)數(shù)會(huì)持續(xù)增加,結(jié)構(gòu)太復(fù)雜,成本太高了,不適應(yīng)以后汽車的普及化。
汽車多媒體系統(tǒng)是一個(gè)新添加的汽車輔助功能,協(xié)議類別也比較簡(jiǎn)單。對(duì)于多媒體系統(tǒng)的應(yīng)用,除了主要用于高速數(shù)據(jù)流傳輸?shù)膮f(xié)議以外,為了節(jié)省節(jié)點(diǎn)的成本,根據(jù)傳輸信號(hào)的不同,也在一些控制功能上采用低速協(xié)議。
在實(shí)際檢測(cè)中,通過(guò)插拔總線系統(tǒng)上的控制單元可以判斷,這是由于控制單元引起的短路還是由于CAN-High與CAN-Low線路連接引起的短路。若為CAN-High與CAN-Low線路連接引起的短路,則需將CAN線組從線節(jié)點(diǎn)處依次拔出,通過(guò)觀測(cè)DS01-9波形來(lái)迅速判定總線系統(tǒng)的故障部位。